
Druckschalter an der Ladestation
Als ersten Sensor möchte ich einen Druckschalter an der Ladestation anbringen der erkennt ob der Rasenmäher-Roboter in der Ladestation steht (gedrückt) oder nicht (nicht gedrückt). Als Homematic Sensor verwende ich eine 3fach-Funk-Schalterschnittstelle HM-SWI-3-FM. Das Bauteil schließe ich an einen Microtaster an und verbaue beides in einem kleinen Kunststoffgehäuse aus dem Elektronik-Fachhandel.

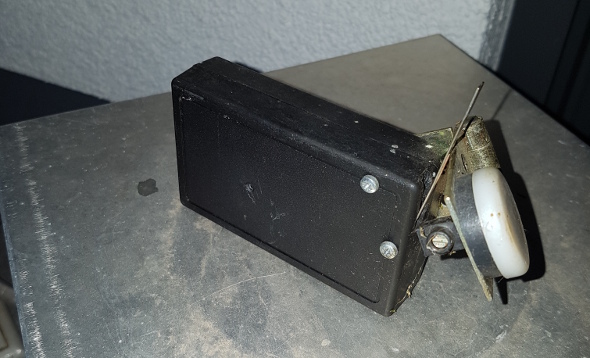
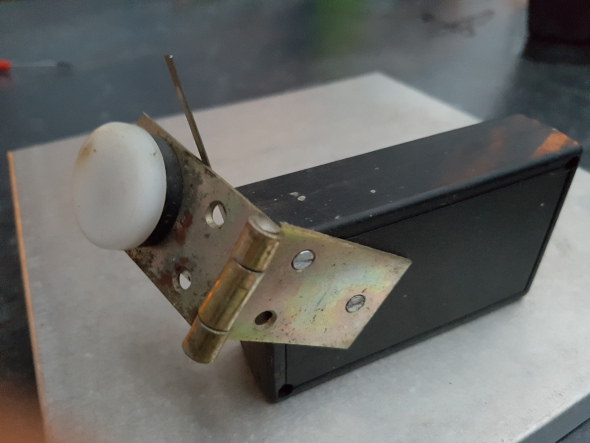
In das Gehäuse bohre ich eine geeignete Öffnung um die Betätigungsmetalllasche des Microtasters nach aussen zu führen. Auf den Deckel des Gehäuses montiere ich ein Scharnier mit einer runden Druckplatte die vom später von einfahrenden Roboter betätigt wird und den Druck auf den Microtaster überträgt.
Im folgenden Bild ist das Gehäuse mit dem Deckel verbunden.
Der Homatic-Aktor sollte natürlich vor der Montage angelernt und getestet werden. Später muss man nur noch das Gehäuse öffnen um die Batterie des Sensors zu wechseln. Anschliessend wir das Ganze mit einer Metalllasche an die Ladestation des Rasenmähers geklemmt so dass der Roboter bei vollständiger Einfahrt den Taster passend betätigt.


Messung des Ladestroms
Als zweite Informationsquelle wird die aufgenommene Stromleistung der Ladestation gemessen. Dazu wird ein Smart Plug von Homematic oder HomematicIP mit Messfunktion verwendet. Bitte beachten dass dieser eingeschaltet sein muss, damit der Rasenmäher-Roboter funktioniert. Schaltet man den Smart Plug ab, bleibt der Roboter sofort stehen weil der Begrenzungsdraht kein Signal mehr sendet.
da bei mir die Rasenmäher-Ladestation in der Nähe der Gartenhütte steht, habe ich die Stromversorgung wettergeschützt in der Gartenhütte eingebaut.

Beim Betrieb des Rasenmähers oder wenn der Rasenmäher vollgeladen parkt (z.B. außerhalb der eingestellten Betriebszeit), dann verbraucht die Ladestation ca. 1,62 Watt für die Aufrechterhaltung der Ladeelektronik und des Signals auf dem Begrenzungsdraht. Wenn der Rasenmäher aktiv lädt, steigt der Verbrauch auf ca. 16 Watt. Deshalb verwende ich einen Schwellwert von 3 Watt.
Die Logik
Folgende Logik wende ich in einem Programm in der CCU2 an, um den Zustand des Rasenmähers zu ermitteln:
- Leistungsaufnahme < 3 Watt, Kontakt gedrückt: Der Roboter parkt
- Leistungsaufnahme < 3 Watt, Kontakt nicht gedrückt: Der Roboter fährt/arbeitet
- Leistungsaufnahme > 3 Watt, Kontakt gedrückt: Der Roboter lädt
- Leistungsaufnahme < 3 Watt, Kontakt länger als 90 Minuten nicht gedrückt: Der Roboter hat sich offensichtlich festgefahren oder wurde manuell angehalten. Alarm!